|
Completing Ph.D. at Robotics Laboratory in Seoul National University, under the supervision of Professor Frank C. Park, and currently working at the Robot Center of Samsung Research, Samsung Electronics.
Email: jihwankim@robotics.snu.ac.kr CV / Google Scholar / Github / Youtube |
|
My research interests lie at the intersection of robotics and machine learning, with a particular focus on motion planning for robot arm manipulation and collision avoidance systems. I am passionate about developing learning-based approaches for robotic systems, including representation learning and active learning methods that can enhance robot performance and safety in complex manipulation tasks. |
|
|
|
Byeongdo Lim*, Jongmin Kim*, Jihwan Kim, Yonghyeon Lee, Frank C. Park Conference on Robot Learning (CoRL) 2024 Project Page • Paper • Code • Bibtex |
|
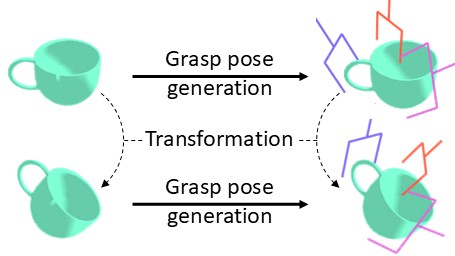
Jungbin Lim*, Jihwan Kim*, Yonghyeon Lee, Cheongjae Jang, Frank C. Park International Conference on Machine Learning (ICML) 2024 Paper • Code • Bibtex |
|
Byeongdo Lim*, Jongmin Kim*, Jihwan Kim, Yonghyeon Lee, Frank C. Park ICRA 2024 Workshop on 3D Visual Representations for Robot Manipulation Paper • Bibtex |
|
Jihwan Kim, Frank C. Park Robotica 2024 Paper • Bibtex |
|
Jihwan Kim, Frank C. Park Conference on Robot Learning (CoRL) 2023 Paper • Code • 3min Video • Bibtex |
|
Seungyeon Kim*, Taegyun Ahn*, Yonghyeon Lee, Jihwan Kim, Michael Y. Wang, Frank C. Park IEEE Transactions on Automation Science and Engineering (T-ASE) 2022 Project Page • Paper • Code • Bibtex |
|
Kyu Min Park, Jihwan Kim, Jinhyuk Park, Frank C. Park IEEE Robotics and Automation Letters (RA-L) 2021 Paper • Bibtex |
|
|

|
Feb 2021 - Sep 2022 with IITP, Project Member Develop high-speed and reliable algorithms for non-prehensile robotic manipulation to automate recycling waste sortation through hitting, pushing, and throwing actions. |
|
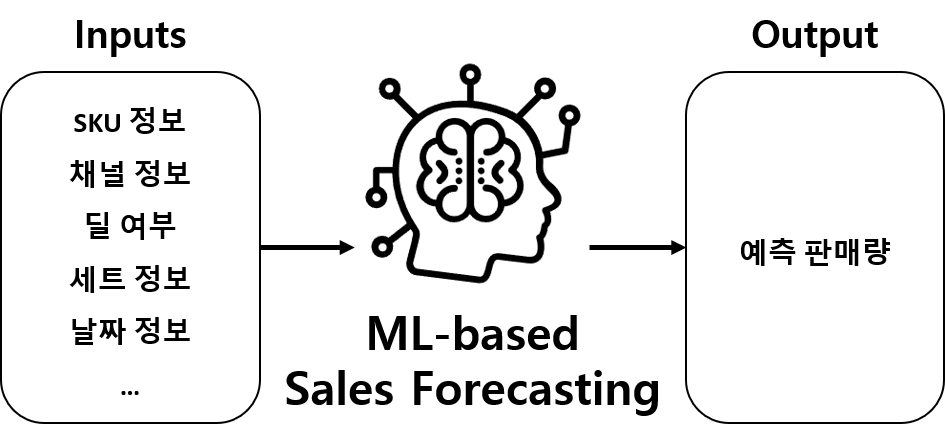
Nov 2020 - Oct 2022 with Fresheasy, Project Member Develop a machine learning model and training system for sales forecasting to optimize food production management. |
|
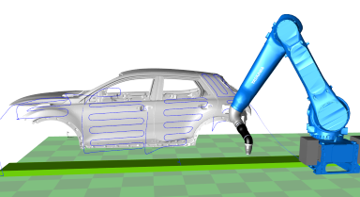
Oct 2020 - Sep 2021 with Doolim-Yaskawa, Project Member Develop an AI-driven automation system for optimizing robotic painting trajectories in automotive manufacturing facilities. |
|
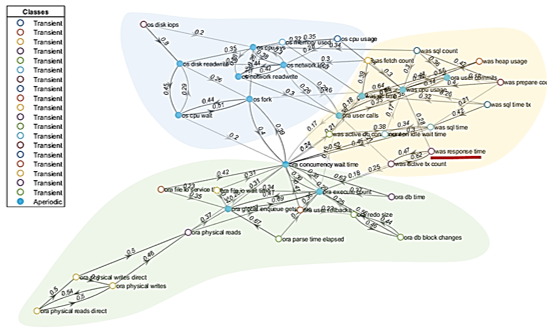
Mar 2020 - May 2020 with EXEM, Project Member Develop a machine learning algorithm for detecting anomalies in large-scale IT systems through analysis of sequential log message patterns and relationships. |
|
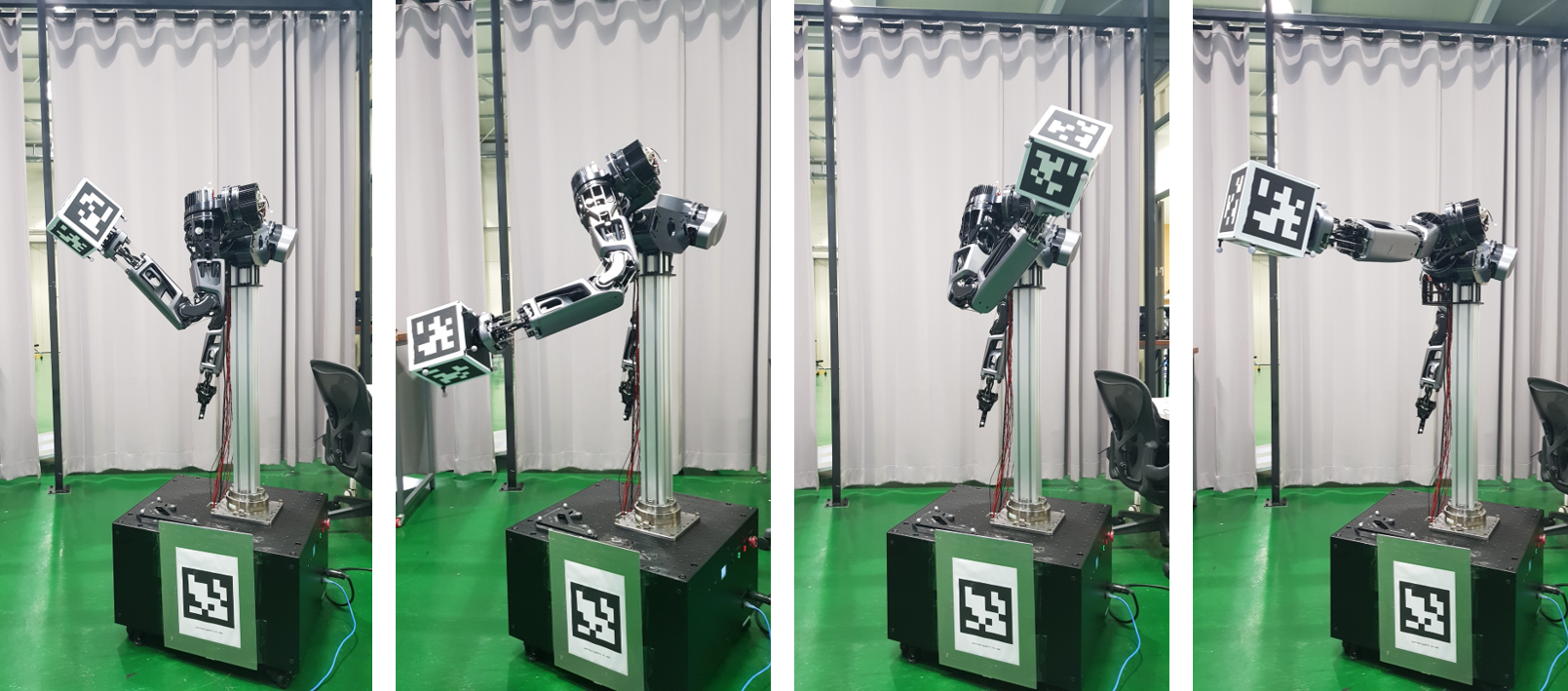
Nov 2019 - Sep 2020 with Naver Labs, Project Member Develop an algorithm for identifying kinematic and dynamic parameters of robot arms with complex tendon-driven mechanisms, focusing on accurate system model identification. |
|
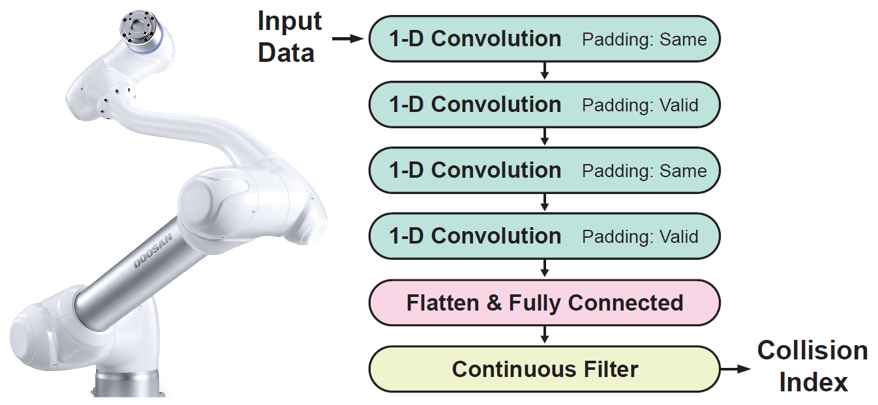
Jun 2019 - Oct 2019 with Doosan Robotics, Project Member Develop a machine learning algorithm for detecting collisions in collaborative robot arms that can identify external torques without using expensive joint torque sensors [J1]. |
|
|
|
|
Template based on Jon Barron's website. |